ROS Stack Integration on AgileX Scout Mini
Project
Robots!
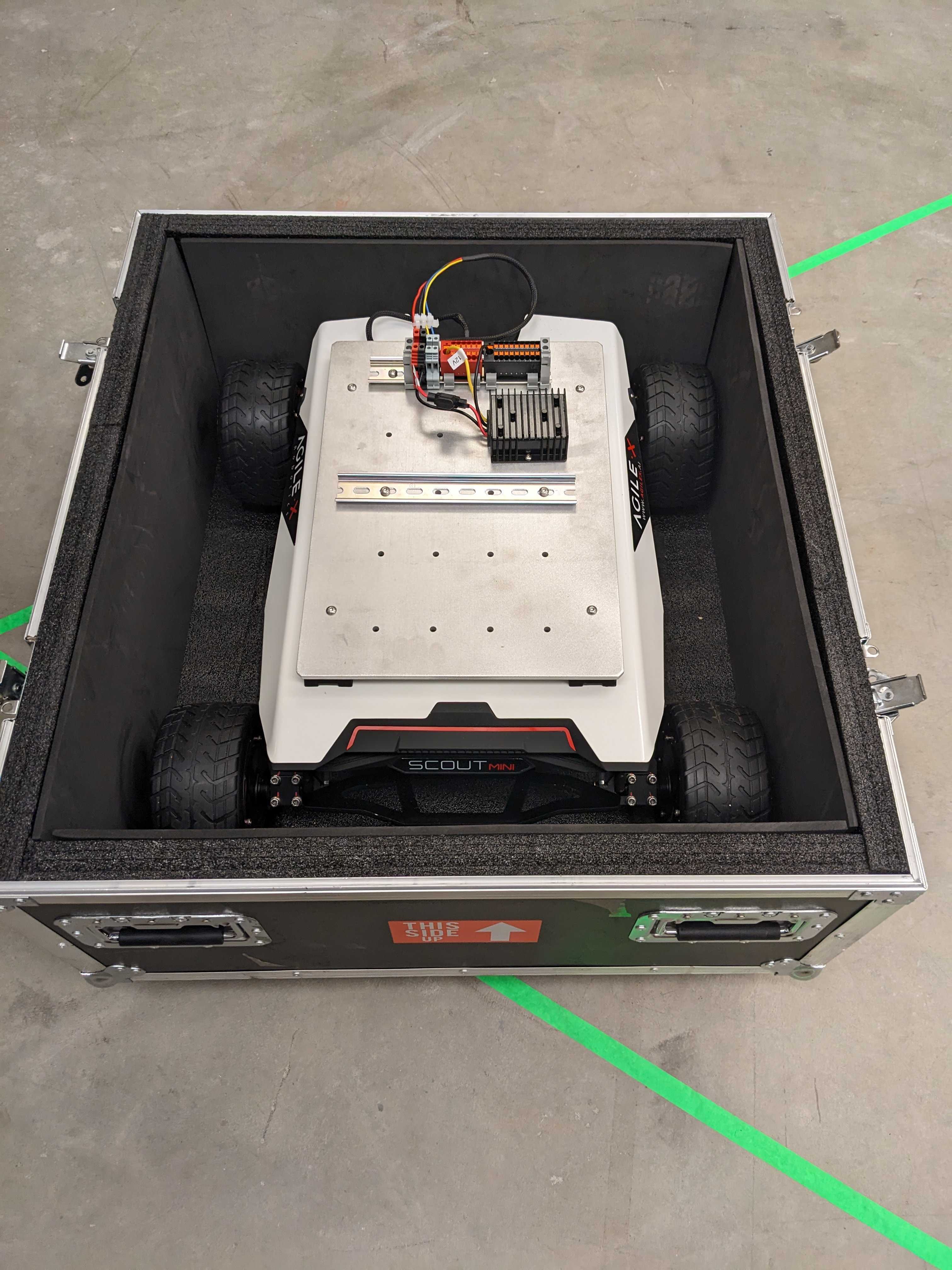
In the Autonomous Robotics and Interactive Systems Experimental (ARISE) Lab at the University of Denver, we recently purchased two brand new ground robot platforms, namely AgileX Scout Minis.
The platforms came out of the box pretty barebones. I worked with others in the lab to spec out a sensor and compute suite for the robots. We wanted to make sure these would be at least as capable as our existing Jackal platform, and ideally even more capable.
Here's the spec list we came up with:
- AgileX Scout Mini Base
- OnLogic Karbon 803 Computer
- Intel i9-12900TE
- 32 GB RAM
- 1 TB Storage
- Nvidia T1000
- Ouster OS-1 32 Channel LIDAR Sensor
- Lord Microstrain 3DM-GX5-25 IMU
- Intel Realsense D455 RGBD Camera
Hardware Integration
The first step was to build a mounting system for our sensors and compute. We went through several design iterations for this, eventually settling on a modular design using 8020 aluminium extrusion. I worked on the fabrication of this design in the machine shop at DU (thanks Justin!!), and also designed a simple sensor mounting plate in Fusion360.
After getting everything mounted up, the next step was getting the electronics wired up. This ended up being simple, as our spec for the platforms included quick-connect points to get CANBUS and 24v from the robot.
Software Integration
Finally, the main hurdle remaining was software integration.
We used our own ROS 1 (Noetic) software stack on the robot. Since this was a new platform for the stack, a significant amount of configuration was necessary.
This project was a learning opportunity for me, as I had not previously worked with the ros_control package. I hope to continue working with more hardware/software integration projects going forward, so learning how this package works was very useful.

